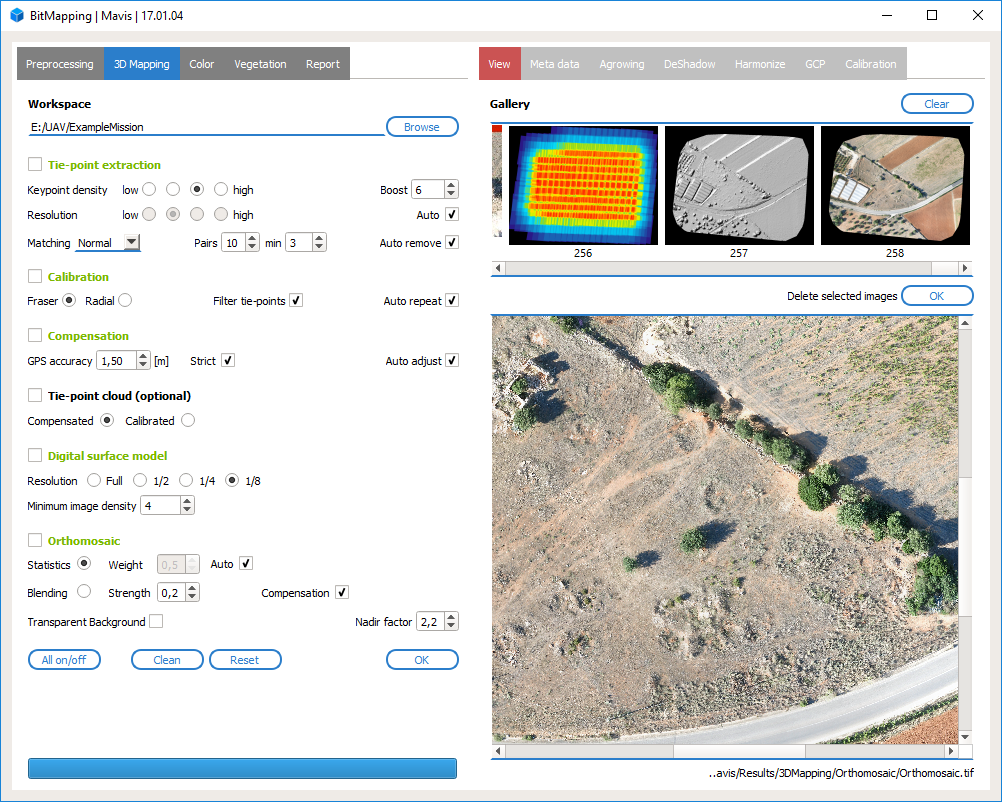
3D Mapping
To generate an Orthomosaic (and a surface model) all 3D Mapping steps are required - except the generation of the Tie-Point Cloud. The process currently running is highlighted in blue. If a processing step is finished it shows up in green.
There are several parameters which can be adjusted. However, we recommend to use the default settings for normal processing.
Tie-point Extraction
Mavis takes care of the tie-point generation settings based on image size. Yet, all settings can be adjusted manually. The lower the keypoint density the faster the process but the higher the risk that some images have no matches.
A higher boosing level allows to generate more tie-points in regions with low contrast, but is not recommended to set it too high for images with an even distribution of features.
The lower the image resolution and the keypoint density, the faster the matching process. However, in some cases a higher keypoint density can be required during matching. To generate precise surface models keypoint density as well as the resolution should be set to high. This requires more RAM and results in slower processing. If the focus is on orthomosaics the defaults should be used. In case of calibration problems the resolution should be reduced and the keypoint density should be increased.
Images with tie-points to less than 3 neighboring images as well as patches of isolated image sets can lead to inconsistencies in camera calibration. In these cases Mavis removes the corresponding images automatically (Auto remove).
Strict matching sets the internal image matching thresholds to very conservative values amining at generating small and low noise tie-point clouds. In somce cases relaxing these settings helps to match images with low overlap.
Camera Calibration
Two different camera calibration models can be selected. Fraser is used as default. It the calibration does not converge Radial should be used. In some cases, this might result in non-linear distortions.
Calibration can be run on the original or filtered tie-points. Filtering can reduce noise. If an image cannot be aligned it is excluded from the calibration if Auto repeat is selected.
If Camera Calibration should not converge, it is most probably due to problems with insufficient key/tie-point density, not enough image-overlap or incorrect geotagging. On option is to try another calibration model. You can also try repeat the calibration process. This might help if there are further images which cannot be aligned.
Orientation and Compensation
Based on the GPS positional accuracy the average PDOP value multiplied by 1.0-2.0 (~HDOP * 2-4) is a good initial choice for compensation in bundle adjustment. The default is set to 1.5m, which is a good initial value for commonly uses GPS mudules such as the ublox M8N. When processing RTK corrected coordinates a value of 0.1 - 0.05 is recommended.
If compensation fails - even if auto adjust is selected - it is recommended to disable the "strict" settings and to increase the GPS accuracy to about 5-10m to reduce the influence of the GPS coordinates.
Tie-point Cloud
Generating a tie-point cloud is optional.
It can be used for interpreting the tie-point distribution as well as the camera calibration. We recommend CloudCompare to view point clouds generated with Mavis.
Digital Surface Model
This is the dense-matching part to generate high resolution surface models and to prepare the ortho images. You can set the Resolution to 1/2, 1/4 or 1/8 to reduce the final resolution of the DSM in relation to the Orthomosaic.
A image density map as well as a hillshade model are added to the Gallery.
The file format of the DEM is a SAGA GIS .sdat/.sgrd file. It can be imported in SAGA GIS as well as QGIS via drag-and-drop and generally in any Software using GDAL.
For short processing times the default resolution is set to 178th of the image resolution. Processing in full resolution is time consuming.
Orthomosaic
This is the final step which generates the orthomosaic. Orthomosaics are always generated in the finest resolution. A detailed description of the various orthomosaic settings are described in the following chapter.